The PID Controller Tool
A physical system that allows users to tune PID parameters and visually observe their effects on system behavior.
Project Overview
A self-balancing system designed for experimental purposes, allowing users to physically and visually interact with the PID controller to observe the effects of changing gain values. This tool is crucial because it complements virtual simulations and provides in-depth validation of system behavior.
Control Panel
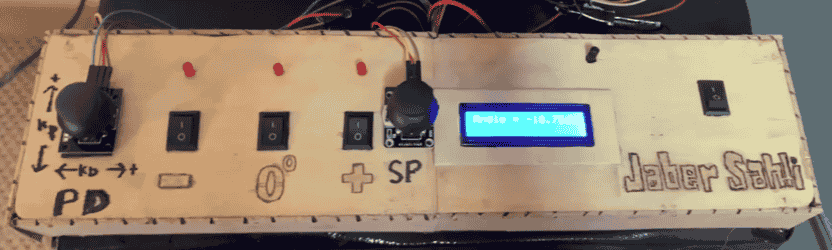
The control panel allows the user to select among three flight modes (positive pitch angle, negative pitch angle, and zero pitch angle), adjust the initial and variable setpoints, and tune the PID gain values Kp, Ki, and Kd. It also includes an LCD screen to monitor the system’s actual angle.
Video Demo
Software Used for This Project
MATLAB
Python/C++
