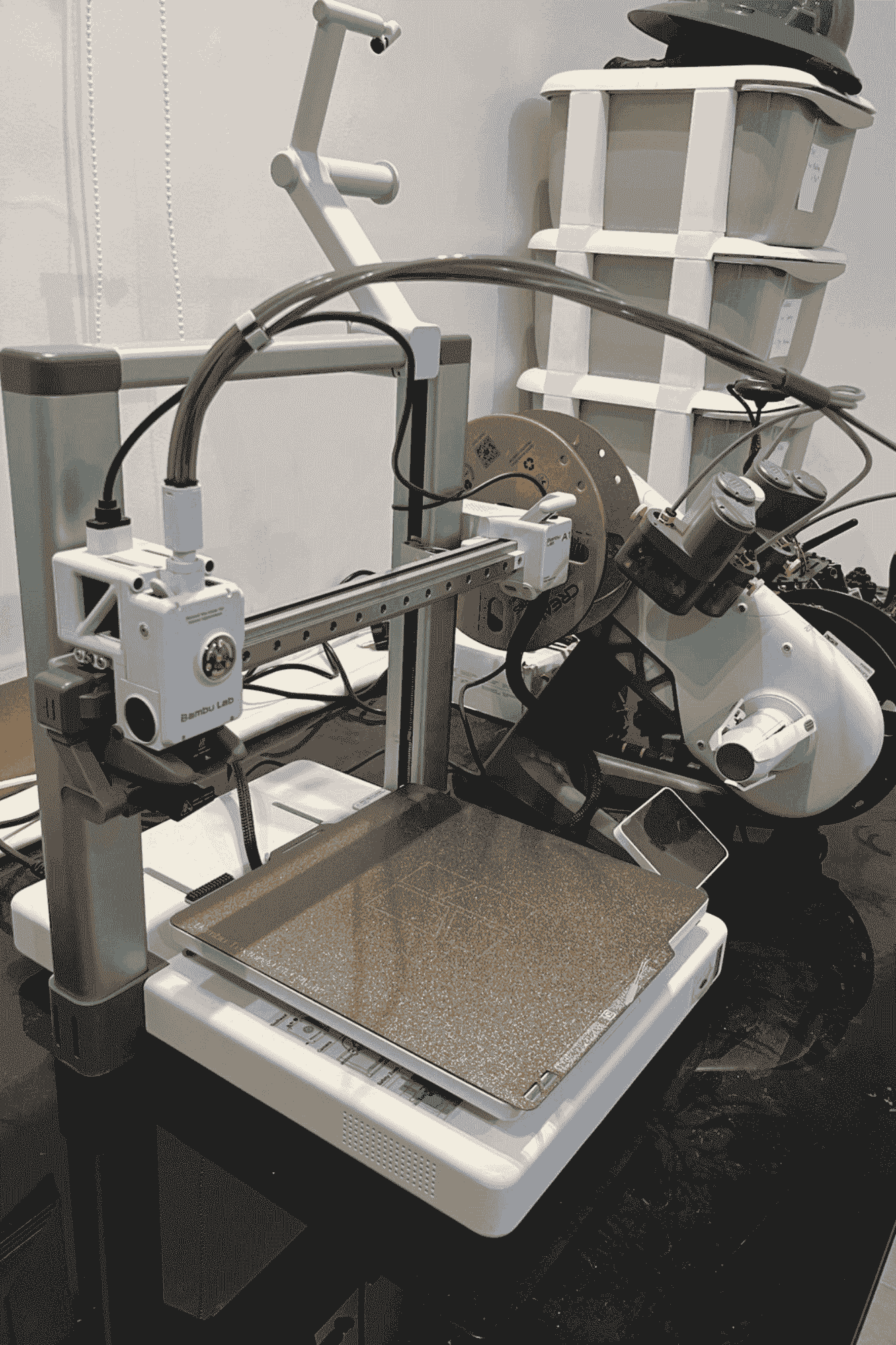
I use the Bambu Lab A1 to print full projects like the TriRaptor and custom parts like mounts, brackets, and mechanical components.
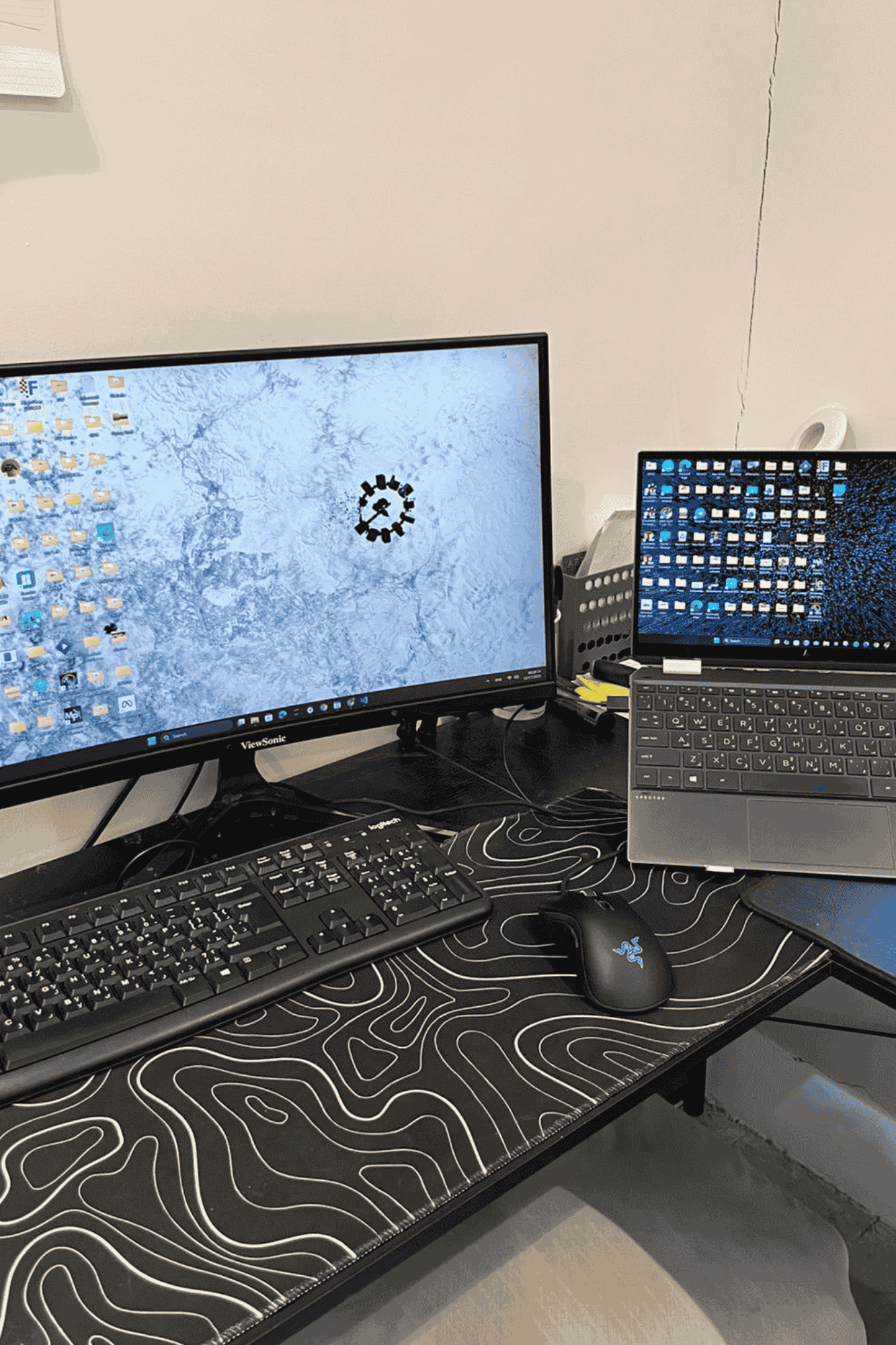
PC
This is my main lab workstation, built with an Intel i5 CPU and AMD RX 6700 GPU. I use it for CAD, simulation, programming, flight simulations, and control systems development.
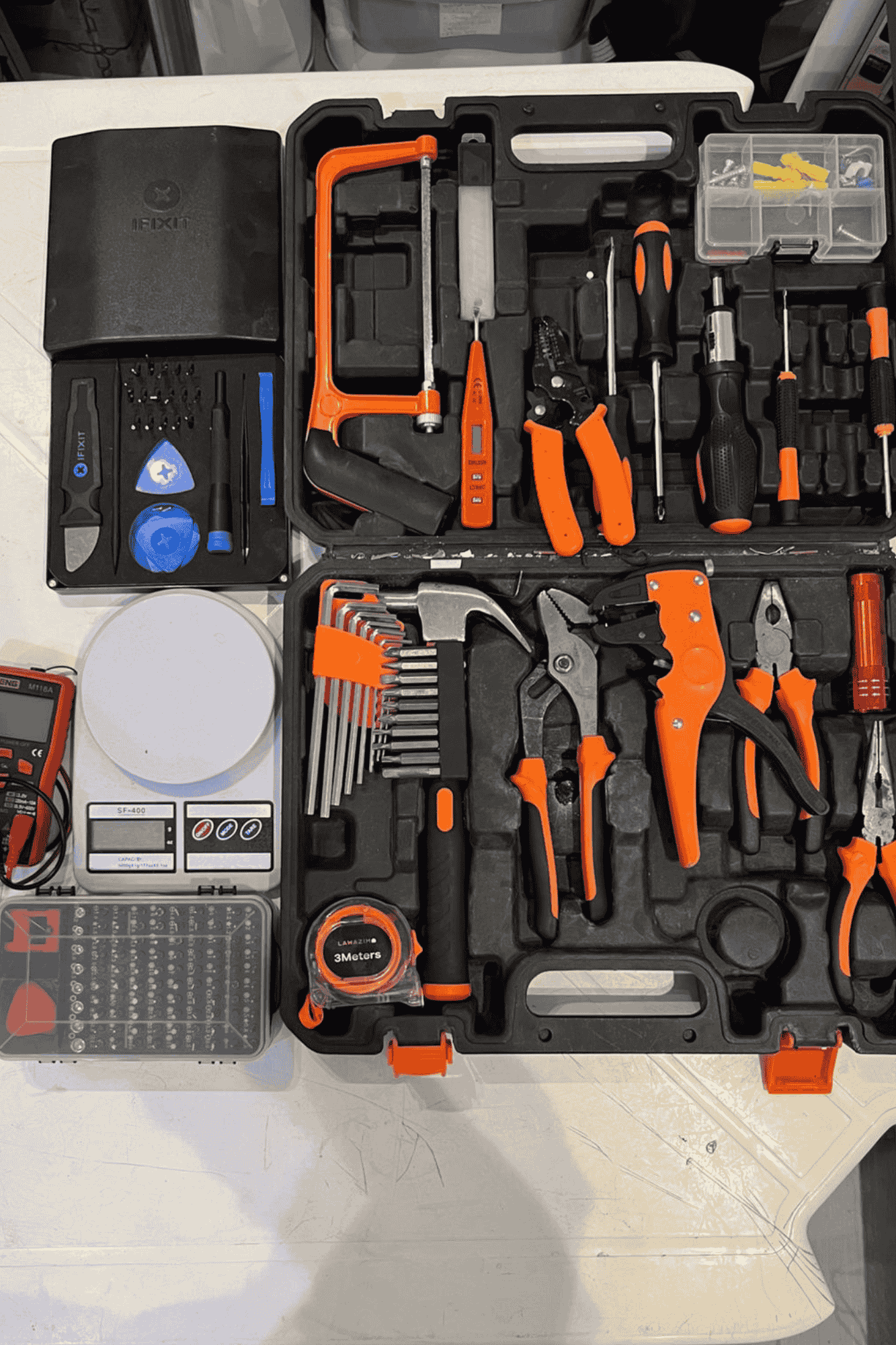
Multipurpose Tools Kit
This is my general tool kit for assembling, adjusting, and repairing hardware. I use it for mechanical work on drones, robotic frames, and lab setups.
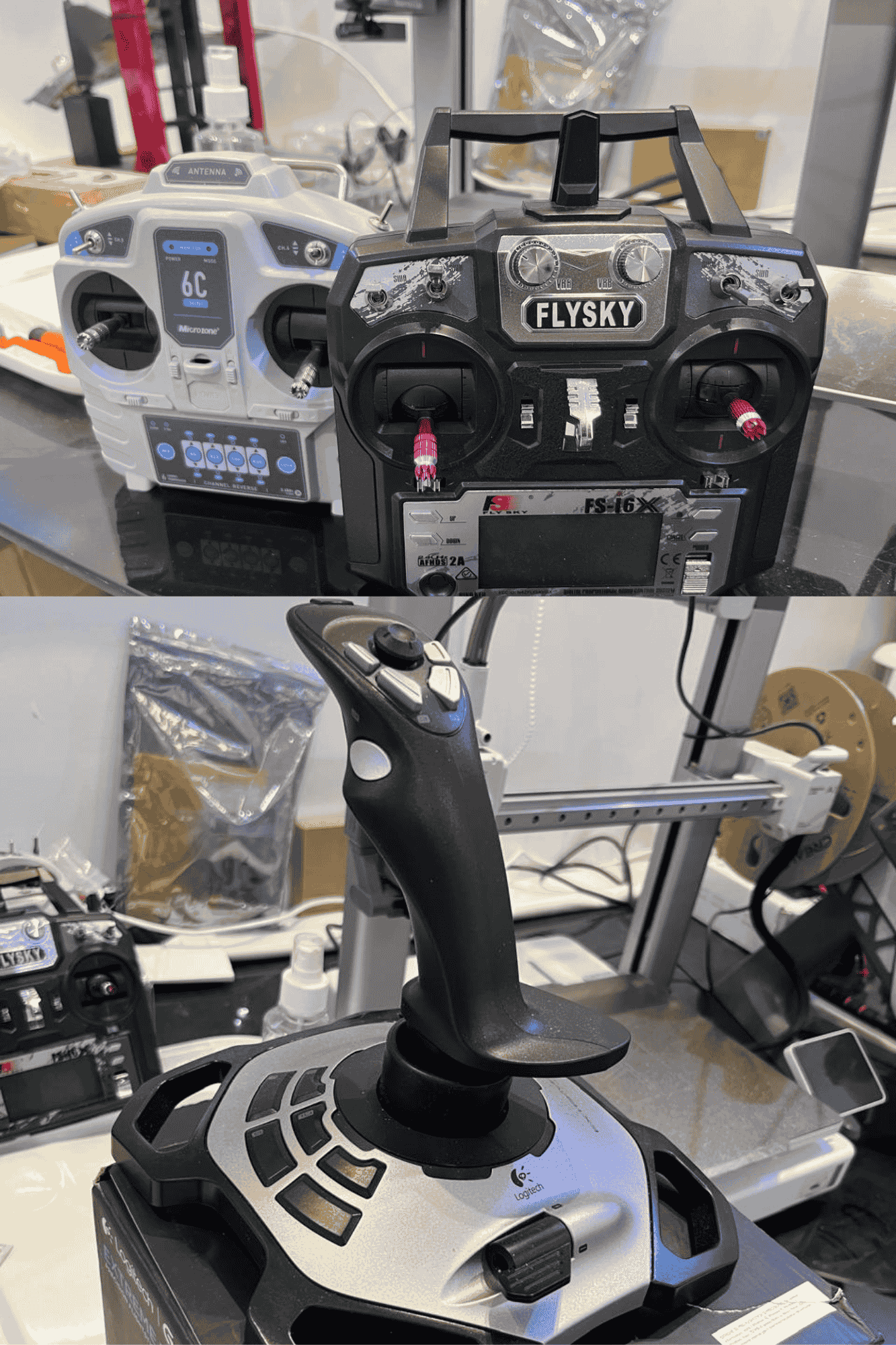
Radio Controllers
I use a Flysky radio controller for drone control and field testing, along with Logitech simulation gear for training and system testing.
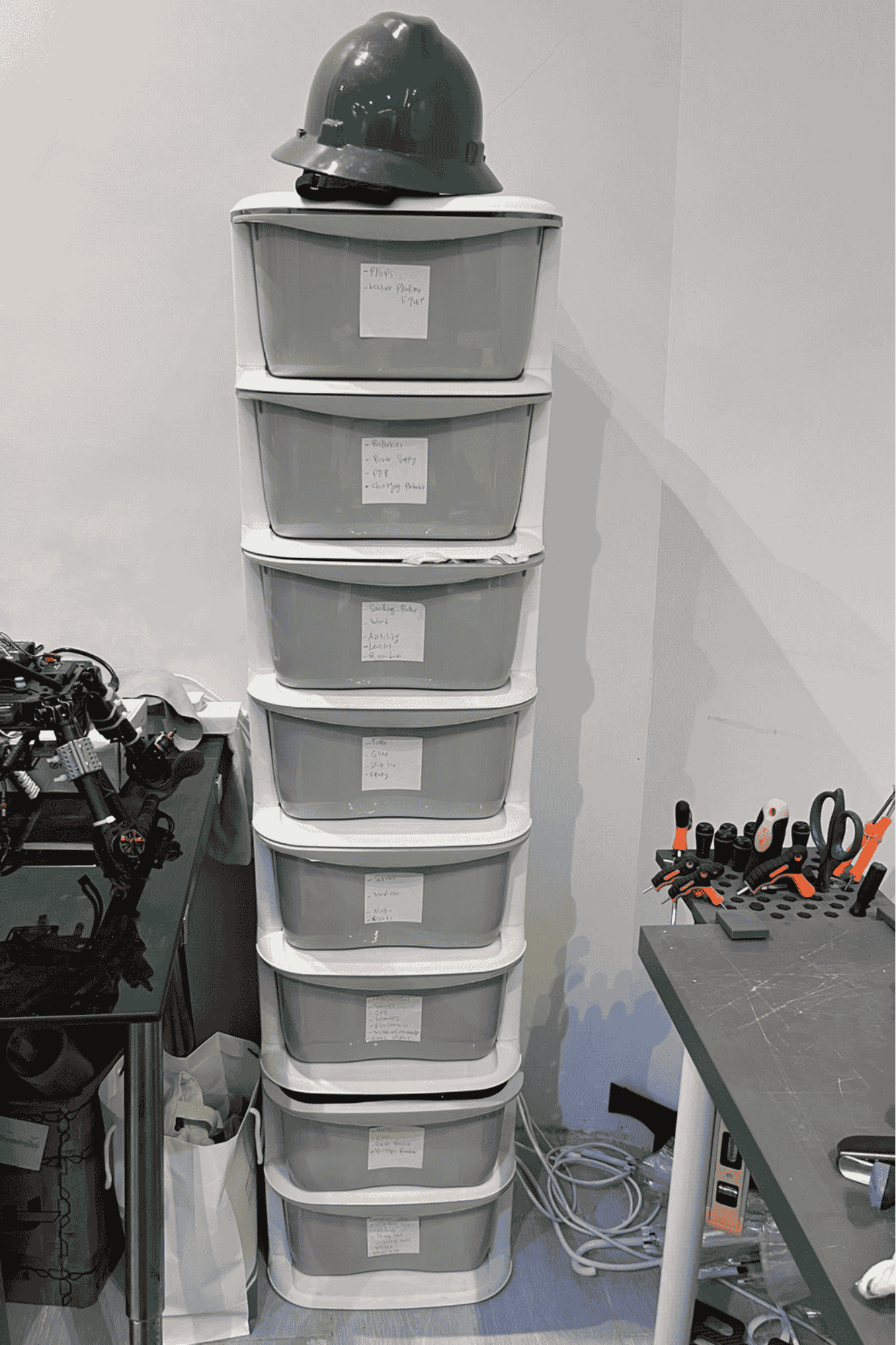
Inventory storage
This is where I organize and store sensors, microcontrollers, actuators, wiring, and electronic components. Keeping everything sorted helps me prototype and experiment quickly.
Soldering Station
I use the soldering station to solder, modify, and repair electronic circuits, including custom boards and sensor connections. It’s essential for prototyping and troubleshooting hardware.
DESIGN | PROGRAMMING | SIMULATION
SOLIDWORKS
I use SolidWorks to design and model full projects, drone frames, mounts, and mechanical parts before building or printing them.
MATLAB
I use MATLAB to model flight dynamics, design control systems, and test system behavior through simulations.
Python/C++
I use Python and C++ to write control code, such as PID controllers and GNC algorithms. Then deploy them on microcontrollers such as ESP 32 for actual testing and control.
ANSYS
I use ANSYS Fluent to analyze aerodynamic effects, and ANSYS Static to evaluate mechanical strength and structural integrity.
NI Multisim
I use NI Multisim to design and simulate electronic circuits to ensure appropriate voltage, current, and resistance levels.
Bambu Studio
I use Bambu Studio as a slicer software to prepare mechanical parts for 3D printing